жҲӘиҮі2020е№ҙеә•пјҢжҲ‘еӣҪе…¬и·Ҝйҡ§йҒ“е…ұ21316еӨ„гҖҒ2199.93дёҮ延зұіпјҢжҳҜзӣ®еүҚдё–з•ҢдёҠе…¬и·Ҝйҡ§йҒ“规模жңҖеӨ§гҖҒж•°йҮҸжңҖеӨҡгҖҒең°иҙЁжқЎд»¶е’Ңз»“жһ„еҪўејҸжңҖеӨҚжқӮгҖҒеҸ‘еұ•йҖҹеәҰжңҖеҝ«зҡ„еӣҪ家гҖӮйҡҸзқҖе…¬и·Ҝйҡ§йҒ“иҝҗиҗҘе№ҙйҷҗзҡ„еўһеҠ пјҢйҡ§йҒ“з»“жһ„еҸҠиЎ¬з ҢиЎЁи§Ӯз—…е®ій—®йўҳж—ҘзӣҠзӘҒеҮәгҖӮ

е…¬и·Ҝйҡ§йҒ“дәәе·ҘжЈҖжөӢж–№ејҸ
зӣ®еүҚе…¬и·Ҝйҡ§йҒ“иЎ¬з ҢиЎЁи§Ӯз—…е®іжЈҖжөӢйҖҡеёёйҮҮз”Ёд»ҘдёӢж–№ејҸ
дәәе·ҘжЈҖжөӢж–№ејҸ
иҜҘж–№ејҸж•ҲзҺҮдҪҺгҖҒе®үе…ЁйЈҺйҷ©й«ҳгҖҒеҜ№дәӨйҖҡиҝҗиҗҘеҪұе“ҚеӨ§пјҢйҡҫд»Ҙж»Ўи¶іеӨ§и§„жЁЎй«ҳйҖҹгҖҒй«ҳж•ҲгҖҒй«ҳзІҫеәҰзҡ„йҡ§йҒ“жЈҖжөӢиҰҒжұӮгҖӮ
дәҢз»ҙеҪұеғҸж–№ејҸ
иҜҘж–№ејҸдёҖиҲ¬йҮҮз”ЁйқўйҳөзӣёжңәжҲ–зәҝйҳөзӣёжңәдёәдё»иҰҒдј ж„ҹеҷЁпјҢеҜ№йҡ§йҒ“иЎ¬з ҢиЎЁйқўиҝӣиЎҢиҝһз»ӯжӢҚж‘„пјҢиҺ·еҸ–еҜ№еә”дҪҚзҪ®зҡ„й«ҳжё…еҪұеғҸпјҢйҖҡиҝҮеҪұеғҸиҝӣиЎҢз—…е®ідҝЎжҒҜж ҮжіЁгҖӮиҜҘж–№ејҸеҸҜе®һзҺ°иЈӮзјқзұ»з—…е®ізҡ„иҜҶеҲ«пјҢдҪҶдәҢз»ҙеҪұеғҸж— ж·ұеәҰдҝЎжҒҜж•…ж— жі•жңүж•ҲеҜ№еҸҳеҪўзұ»з—…е®іе®һзҺ°зІҫзЎ®жЈҖжөӢгҖӮ
дёүз»ҙжҝҖе…үжЈҖжөӢж–№ејҸ
иҜҘж–№ејҸйҮҮз”ЁжҝҖе…үжү«жҸҸд»ӘиҺ·еҸ–й«ҳеҜҶеәҰзҡ„йҡ§йҒ“иЎ¬з ҢиЎЁйқўзӮ№дә‘ж•°жҚ®пјҢеҲ©з”Ёжө·йҮҸдёүз»ҙзӮ№дә‘е®һзҺ°з—…е®іжЈҖжөӢгҖӮеҸҜзІҫзЎ®жЈҖжөӢеҸҳеҪўзұ»з—…е®іпјҢдҪҶж— жі•еҜ№з»Ҷе°ҸиЈӮзјқиҝӣиЎҢиҜҶеҲ«пјҢиЈӮзјқзұ»з—…е®ізҡ„жЈҖжөӢзІҫеәҰдҪҺгҖӮеҗҢж—¶зҺ°жңүзҡ„йҡ§йҒ“иЎ¬з Ңз—…е®іеҝ«йҖҹжЈҖжөӢи®ҫеӨҮеҹәжң¬д»Ҙзј–з ҒеҷЁиҝӣиЎҢйҮҢзЁӢе®ҡдҪҚпјҢеӣ иҪҪиҪҰиЎҢ驶иҝҮзЁӢдёӯж— жі•е§Ӣз»Ҳе№іиЎҢдәҺйҡ§йҒ“зҡ„дёӯеҝғиҪҙзәҝж–№еҗ‘пјҢдё”йҡ§йҒ“дёӯжІЎжңүеҜҶйӣҶзҡ„йҮҢзЁӢж Үеҝ—пјҢж— жі•зІҫеҮҶж ЎеҮҶйҮҢзЁӢпјҢеҜјиҮҙжЈҖжөӢз»“жһңйҮҢзЁӢиҜҜе·®иҫғеӨ§пјҢйҡҫд»ҘеҮҶзЎ®е®ҡдҪҚз—…е®ідҪҚзҪ®пјҢеҪұе“Қз»“жһңжЈҖж ёеҸҠе…»жҠӨеӨ„зҗҶзҡ„еҸҠж—¶жҖ§гҖӮ
з»јдёҠжүҖиҝ°пјҢдёәжҸҗй«ҳйҡ§йҒ“з—…е®іе®ҡжңҹжЈҖжөӢзҡ„ж•ҲзҺҮеҸҠеҮҶзЎ®жҖ§пјҢдёәйҡ§йҒ“科еӯҰгҖҒеҗҲзҗҶе…»жҠӨжҸҗдҫӣеҶізӯ–дҫқжҚ®пјҢдәҹйңҖжҺўзҙўеҲӣж–°жҖ§зҡ„йҡ§йҒ“жЈҖжөӢжҠҖжңҜгҖӮ
иҜҘжҠҖжңҜжҳҜеҹәдәҺз»„еҗҲеҜјиҲӘе®ҡдҪҚгҖҒеӨҡжәҗдј ж„ҹеҷЁйӣҶжҲҗгҖҒж—¶з©әеҗҢжӯҘжҺ§еҲ¶гҖҒжө·йҮҸеӨ§ж•°жҚ®зӮ№дә‘з®ЎзҗҶзӯүеүҚжІҝз ”з©¶пјҢйӣҶжҲҗдёүз»ҙжҝҖе…үжү«жҸҸд»ӘгҖҒй«ҳжё…е·ҘдёҡзӣёжңәгҖҒй«ҳзІҫеәҰжғҜеҜјгҖҒGNSSгҖҒеӨҡжәҗдј ж„ҹеҷЁеҗҢжӯҘжҺ§еҲ¶зӯүзі»з»ҹпјҢе°Ҷй«ҳжё…еҪұеғҸжЈҖжөӢжҠҖжңҜгҖҒдёүз»ҙжҝҖе…үжү«жҸҸжЈҖжөӢжҠҖжңҜгҖҒй«ҳзІҫеәҰз»„еҗҲеҜјиҲӘе®ҡдҪҚжҠҖжңҜйӣҶжҲҗеә”з”ЁдәҺдёҖдҪ“пјҢдёҚд»…еҸҜе®һзҺ°еҜ№0.3mmиЈӮзјқзҡ„жЈҖжөӢпјҢиҖҢдё”иғҪе®һзҺ°еҜ№еҸҳеҪўзұ»з—…е®ізҡ„зІҫеҮҶиҜҶеҲ«пјҢ并且еҸҜжҸҗдҫӣ0.2mд»ҘеҶ…зҡ„йҮҢзЁӢе®ҡдҪҚзІҫеәҰгҖӮ
иҜҘжҠҖжңҜеҸҜдёҖж¬ЎжҖ§еҝ«йҖҹиҺ·еҸ–йҡ§йҒ“е…Ёж–ӯйқўдёүз»ҙзӮ№дә‘еҸҠеҪұеғҸж•°жҚ®пјҢйҮҚжһ„йҡ§йҒ“дёүз»ҙжЁЎеһӢпјҢе®һзҺ°еҜ№йҡ§йҒ“иЈӮзјқгҖҒжё—жјҸж°ҙгҖҒиЎ¬з ҢиЎЁеұӮиө·еұӮгҖҒеүҘиҗҪгҖҒжҺүеқ—гҖҒжҺ’ж°ҙжІҹжҚҹеқҸзӯүз—…е®ізҡ„жЈҖжөӢпјҢи§ЈеҶідәҶзәҜеӣҫеғҸжЈҖжөӢж–№ејҸе®ҡдҪҚзІҫеәҰе·®гҖҒеҜ№еҪўеҸҳзұ»з—…е®іиҜҶеҲ«зҺҮдҪҺзӯүй—®йўҳпјҢеҗ„жЈҖжөӢжҢҮж ҮзІҫеәҰж»Ўи¶ійҡ§йҒ“жЈҖжөӢзӣёе…іи§„иҢғиҰҒжұӮгҖӮ

йҡ§йҒ“дёүз»ҙжҝҖе…үи§Ҷйў‘жЈҖжөӢзі»з»ҹ
йҡ§йҒ“дёүз»ҙжҝҖе…үи§Ҷйў‘жЈҖжөӢзі»з»ҹжҠҖжңҜжҢҮж Ү
|
еәҸеҸ· |
зі»з»ҹеҠҹиғҪ |
жҠҖжңҜжҢҮж Ү |
жҠҖжңҜеҸӮж•° |
|
1 |
жЈҖжөӢеҠҹиғҪ |
иЎ¬з Ң |
иЎ¬з ҢиЈӮзјқгҖҒиЎЁеұӮиө·еұӮгҖҒи„ұиҗҪгҖҒиЈӮзјқжё—жјҸж°ҙзӯү |
|
2 |
жЈҖдҝ®йҒ“ |
жҚҹеқҸгҖҒзӣ–жқҝзјәеӨұгҖҒж ҸжқҶеҸҳеҪўгҖҒй”ҲиҡҖгҖҒзјәжҚҹзӯү |
|
|
3 |
еҗҠйЎ¶ |
еҸҳеҪўгҖҒз ҙжҚҹ |
|
|
4 |
еҶ…иЈ…йҘ°жқҝ |
иЎЁйқўи„ҸжұЎгҖҒзјәжҚҹпјӣиЈ…йҘ°жқҝеҸҳеҪўгҖҒзјәжҚҹзӯү |
|
|
5 |
ж Үеҝ—/зәҝ/иҪ®е»“ж Ү |
ж ҮзәҝзјәжҚҹгҖҒиЎЁйқўи„ҸжұЎ |
|
|
6 |
жҺ’ж°ҙзі»з»ҹ |
жІҹзӣ–жқҝзјәеӨұгҖҒжҚҹеқҸ |
|
|
7 |
зі»з»ҹзІҫеәҰ |
иЈӮзјқжЈҖжөӢзІҫеәҰ |
≥0.3 mm |
|
8 |
жҺүеқ—жЈҖжөӢзІҫеәҰ |
≥5 mm |
|
|
9 |
йҮҢзЁӢе®ҡдҪҚзІҫеәҰ |
≤0.2 m |
|
|
10 |
жЈҖжөӢж—¶йҖҹ |
иЎҢ驶йҖҹеәҰ |
0-80km/h |
пјҲ1пјүеҹәдәҺдёүз»ҙжҝҖе…үзӮ№дә‘з”ҹжҲҗйҡ§йҒ“зҒ°еәҰеӣҫгҖҒж·ұеәҰеӣҫ
|
йЎ№зӣ® |
зҒ°еәҰеӣҫгҖҒж·ұеәҰеӣҫ |
дј з»ҹж–№ејҸ |
|
з—…е®іиҜҶеҲ« |
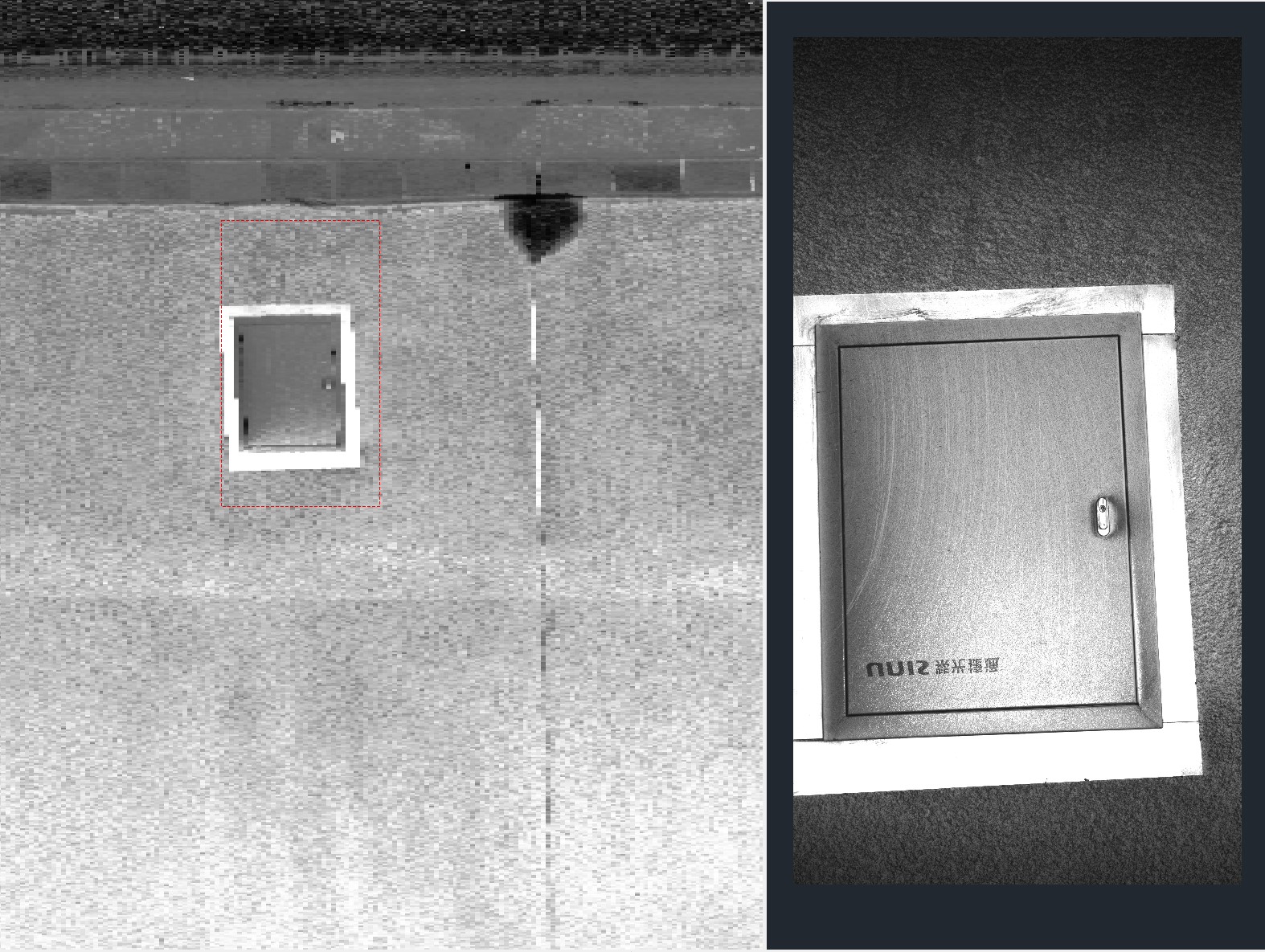
еҹәдәҺдёүз»ҙзӮ№дә‘жӯЈе°„жҠ•еҪұз”ҹжҲҗж·ұеәҰеӣҫпјҢеӣҫеғҸйҖҡиҝҮйўңиүІжёІжҹ“ж–№ејҸпјҢзІҫзЎ®жҳҫзӨәйҡ§йҒ“иЎ¬з ҢиЎЁйқўзҡ„й«ҳе·®еҸҳеҢ–пјҢеҸҜзӣҙжҺҘе®ҡдҪҚжҺүеқ—зӯүеҸҳеҪўзұ»з—…е®ідҪҚзҪ®гҖӮ |
дј з»ҹзҡ„еҪұеғҸжЈҖжөӢж–№ејҸд»…иғҪйҖҡиҝҮеӣҫеғҸзІҫзЎ®иҜҶеҲ«иЈӮзјқзұ»з—…е®іпјҢж— жі•еҮҶзЎ®иҜҶеҲ«еҸҳеҪўзұ»з—…е®ігҖӮ |
|
йҡ§йҒ“йў„и§Ҳеӣҫ |
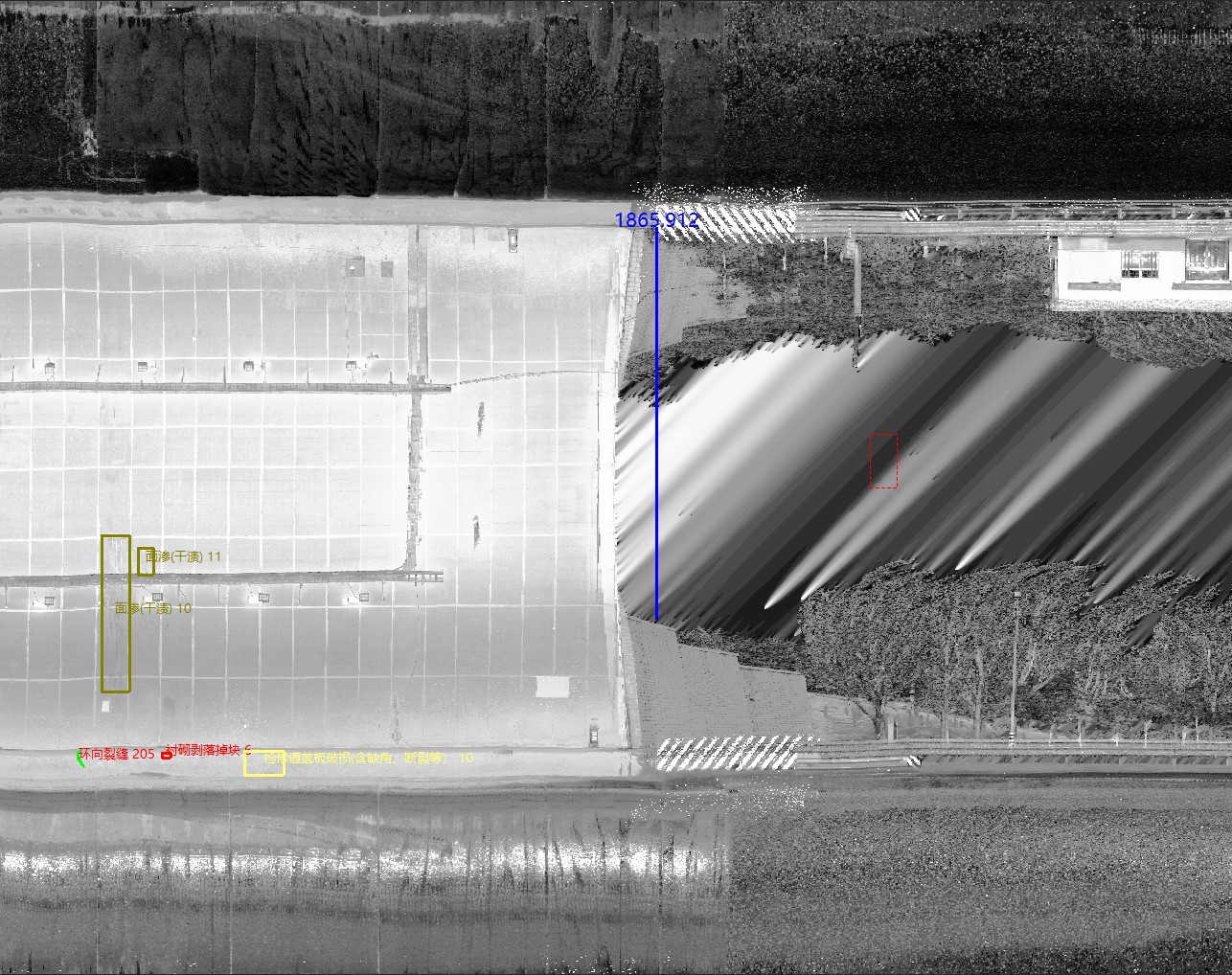
еҹәдәҺдёүз»ҙзӮ№дә‘жӯЈе°„жҠ•еҪұз”ҹжҲҗзҒ°еәҰеӣҫпјҢж— йңҖжӢјжҺҘеҚіеҸҜжҸҗдҫӣйҡ§йҒ“йў„и§ҲеӣҫпјҢиҜҘеӣҫеғҸж— жӢјжҺҘзјқгҖҒе…үз…§дёҚеқҮеҢҖзӯүй—®йўҳпјҢе°ҶжҸҗдҫӣзҫҺи§Ӯзҡ„жҲҗжһңеұ•зӨәж•ҲжһңгҖӮ |
йқўйҳөзӣёжңәд»…иғҪеҲ©з”ЁжӢјжҺҘж–№ејҸжҸҗдҫӣйҡ§йҒ“йў„и§ҲеӣҫпјҢеұ•зӨәж•ҲжһңеҸ—жӢјжҺҘжҠҖжңҜеҪұе“ҚиҫғеӨ§пјӣзәҝйҳөзӣёжңәеҸ—йҮҮйӣҶиҝҮзЁӢдёӯпјҢз”ұдәҺзі»з»ҹе§ҝжҖҒзҡ„еҠЁжҖҒеҸҳеҢ–пјҢйў„и§ҲеӣҫеҪұеғҸе°ҶдјҡеҸ‘з”ҹжүӯжӣІеҸҳеҪўгҖӮ |
.jpg)
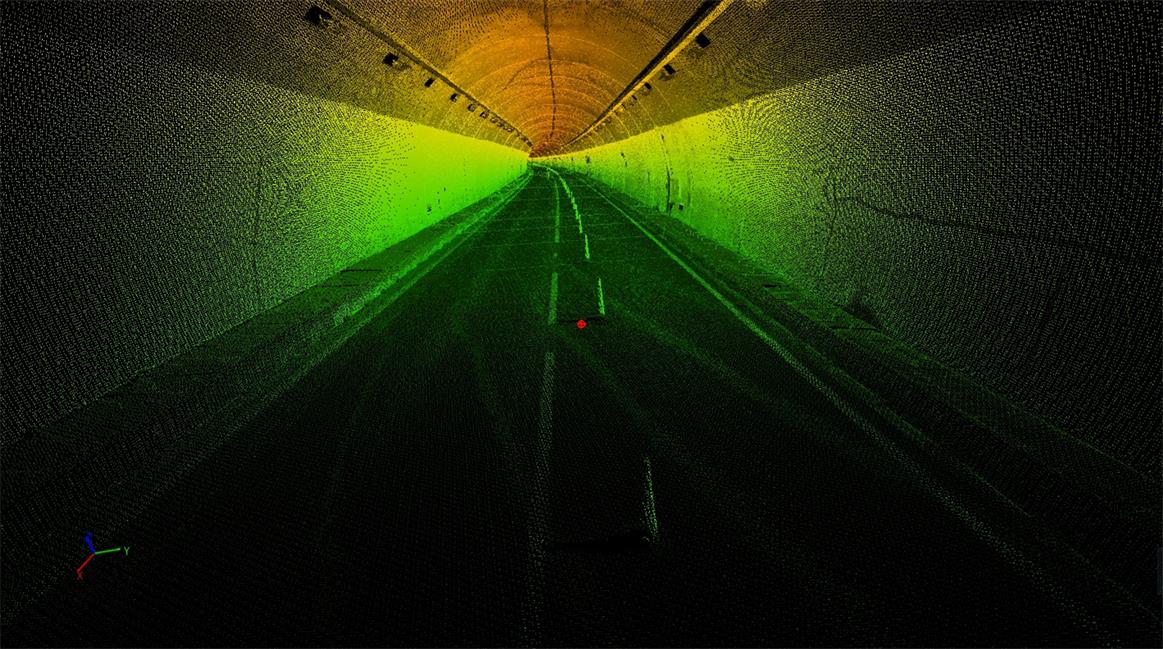
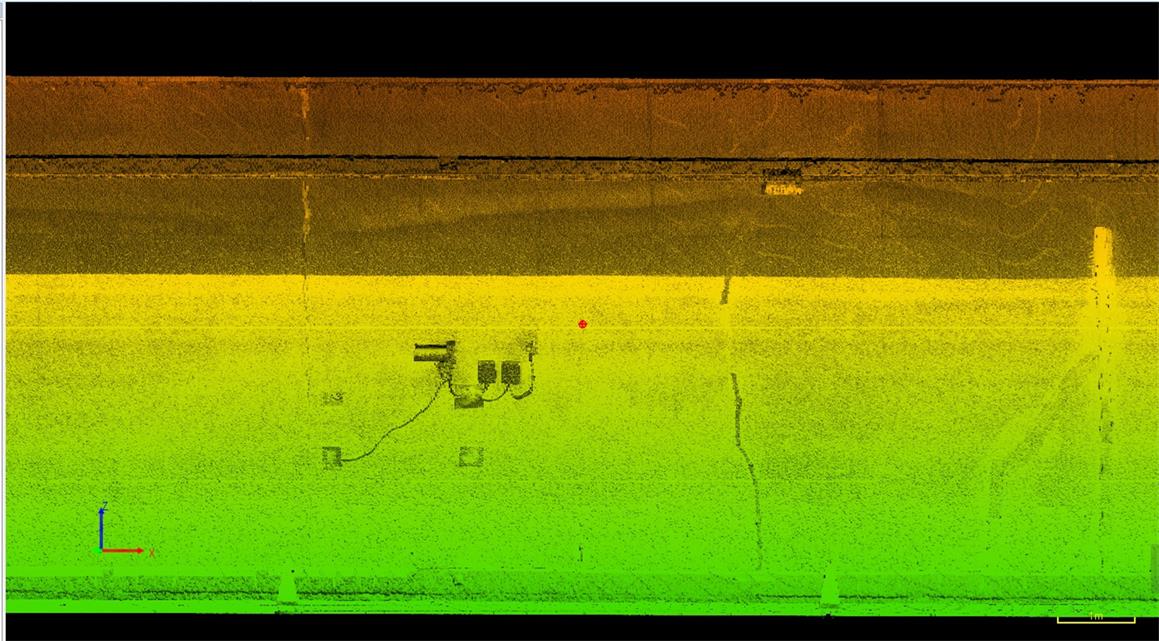
е…¬и·Ҝйҡ§йҒ“дёүз»ҙзӮ№дә‘ж•°жҚ®
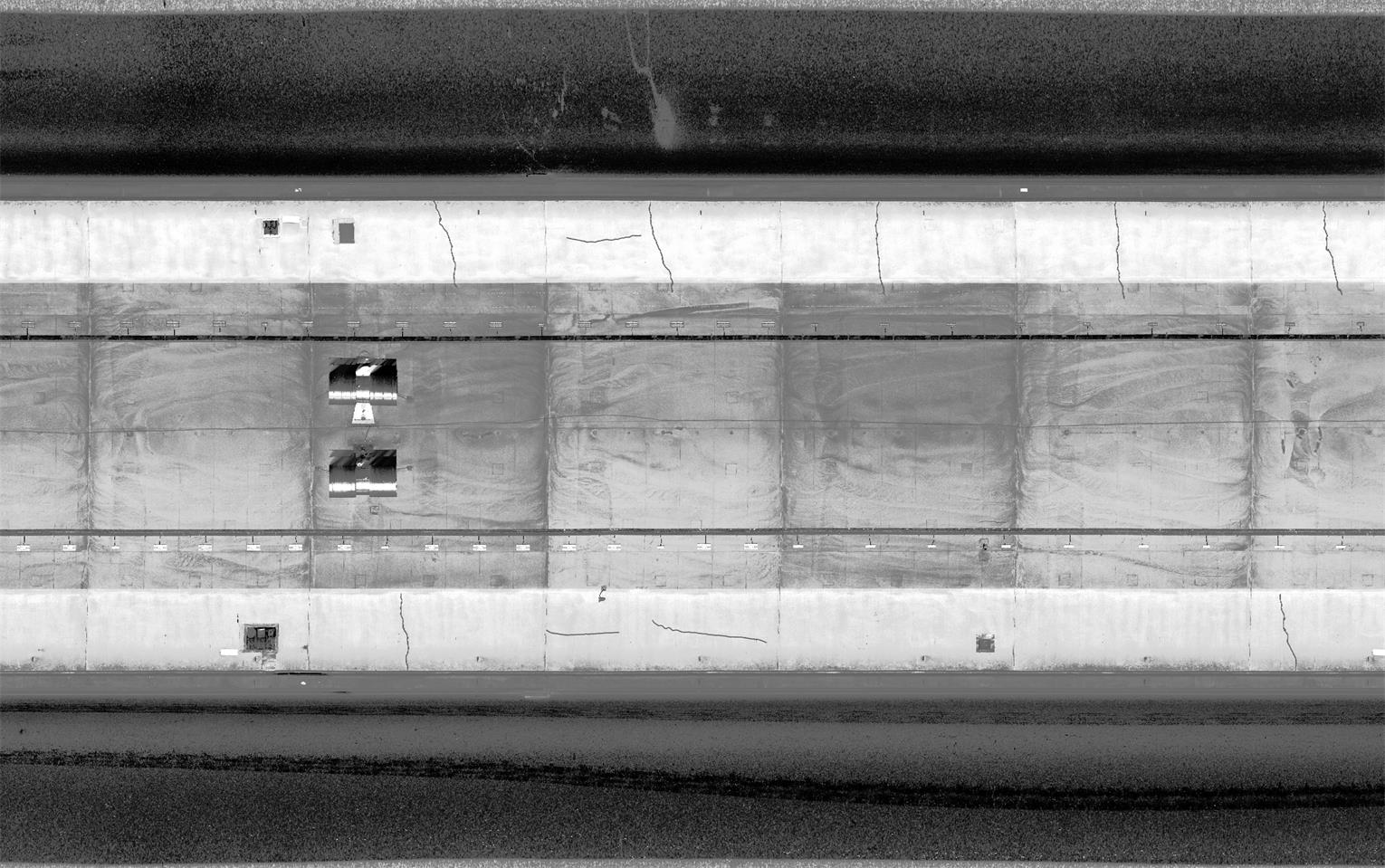
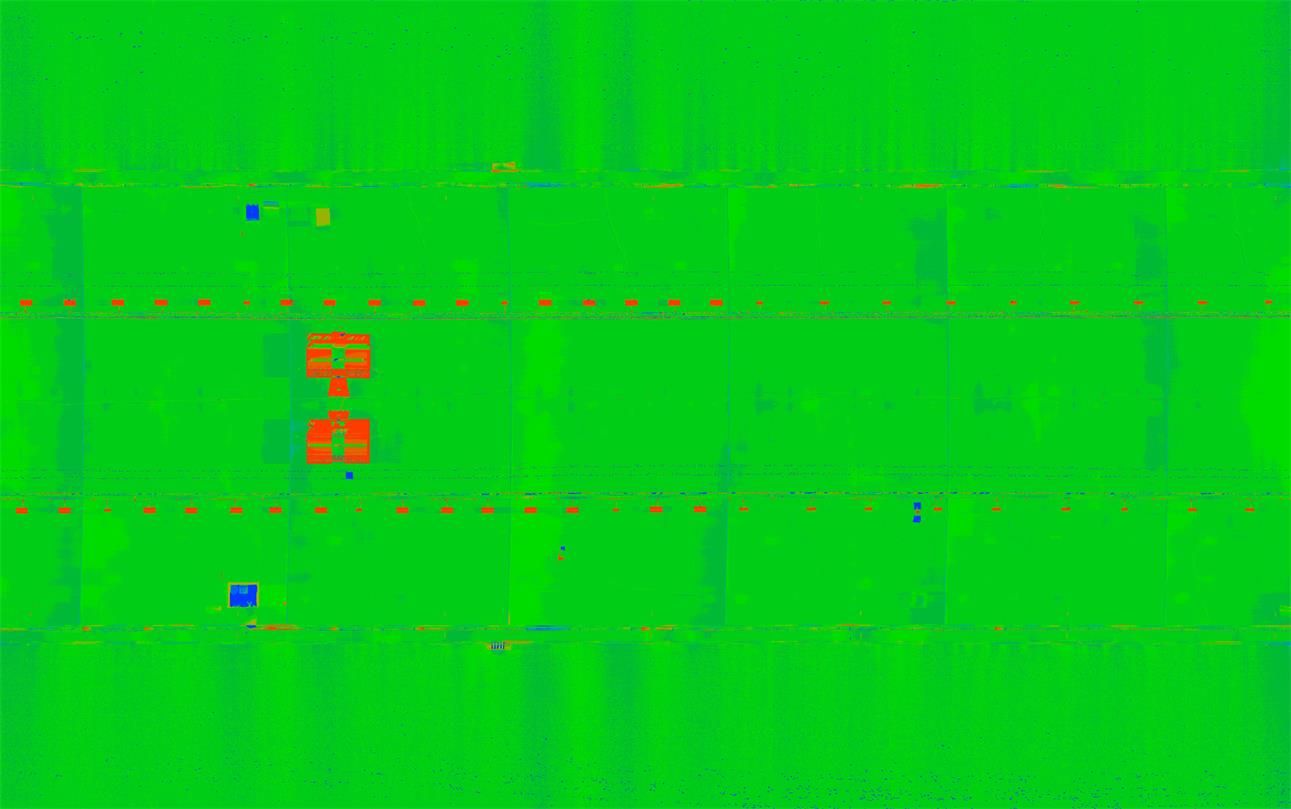
е…¬и·Ҝйҡ§йҒ“еҗҢдёҖдҪҚзҪ®зҒ°еәҰеӣҫеҸҠж·ұеәҰеӣҫ
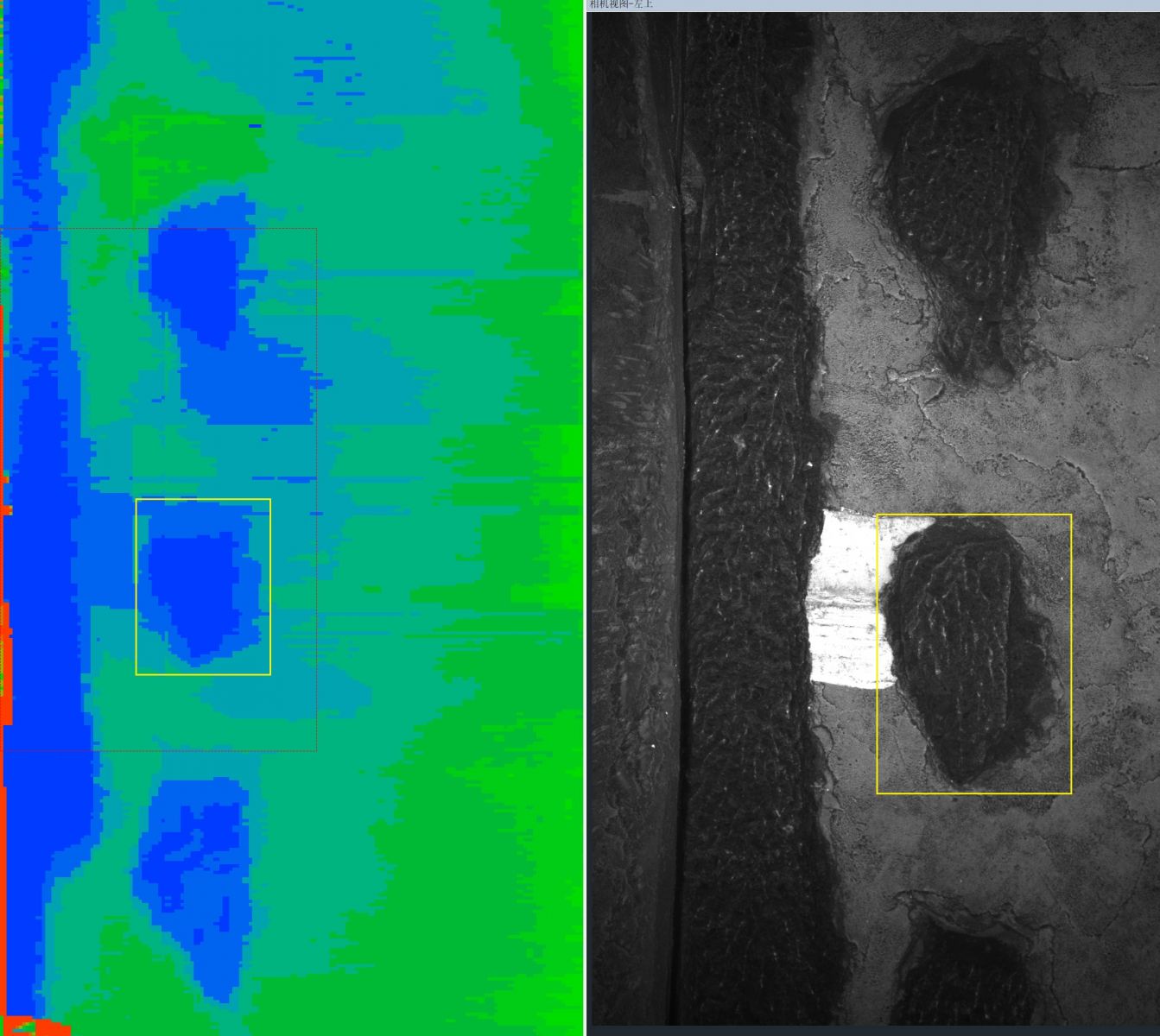
еҹәдәҺж·ұеәҰеӣҫиҜҶеҲ«еҸҳеҪўзұ»з—…е®і
пјҲ2пјүзҒ°еәҰеӣҫгҖҒж·ұеәҰеӣҫдёҺй«ҳжё…еҪұеғҸзІҫзЎ®еҢ№й…Қ
|
йЎ№зӣ® |
зҒ°еәҰеӣҫгҖҒж·ұеәҰеӣҫгҖҒй«ҳжё…еҪұеғҸ |
дј з»ҹж–№ејҸ |
|
иҒ”еҗҲдҪңдёҡ |
еҹәдәҺй«ҳзІҫеәҰеӨҡжәҗдј ж„ҹеҷЁеҗҢжӯҘжҺ§еҲ¶жҠҖжңҜгҖҒйҡ§йҒ“дёүз»ҙжЁЎеһӢйҮҚжһ„жҠҖжңҜпјҢе®һзҺ°зҒ°еәҰеӣҫгҖҒж·ұеәҰеӣҫгҖҒй«ҳжё…еҪұеғҸзҡ„зІҫеҮҶеҢ№й…ҚпјҢеӨҡжәҗж•°жҚ®е®һж—¶иҒ”еҠЁи°ғжҹҘз—…е®іпјҢе……еҲҶеҸ‘жҢҘзӮ№дә‘зҡ„й«ҳзІҫеәҰеҮ дҪ•зү№жҖ§гҖҒеҪұеғҸзҡ„й«ҳеҲҶиҫЁзҺҮдјҳеҠҝпјҢдёәз—…е®іи°ғжҹҘжҸҗдҫӣеӨҡз§Қз»ҙеәҰзҡ„еҹәзЎҖж•°жҚ®гҖӮ |
дј з»ҹзҡ„еҪұеғҸжЈҖжөӢж–№ејҸд»…иғҪеә”з”ЁеӣҫеғҸе®һзҺ°з—…е®іжҸҗеҸ–пјҢжҝҖе…үжЈҖжөӢж–№ејҸд№ҹеҸӘиғҪеҮӯеҖҹж·ұеәҰеӣҫгҖҒзҒ°еәҰеӣҫиҝӣиЎҢз—…е®іиҜҶеҲ«пјҢж— жі•д»ҺеӨҡз»ҙеәҰе®һзҺ°з—…е®іи°ғжҹҘгҖӮ |

зҒ°еәҰеӣҫгҖҒж·ұеәҰеӣҫдёҺй«ҳжё…еҪұеғҸзІҫеҮҶеҢ№й…Қ
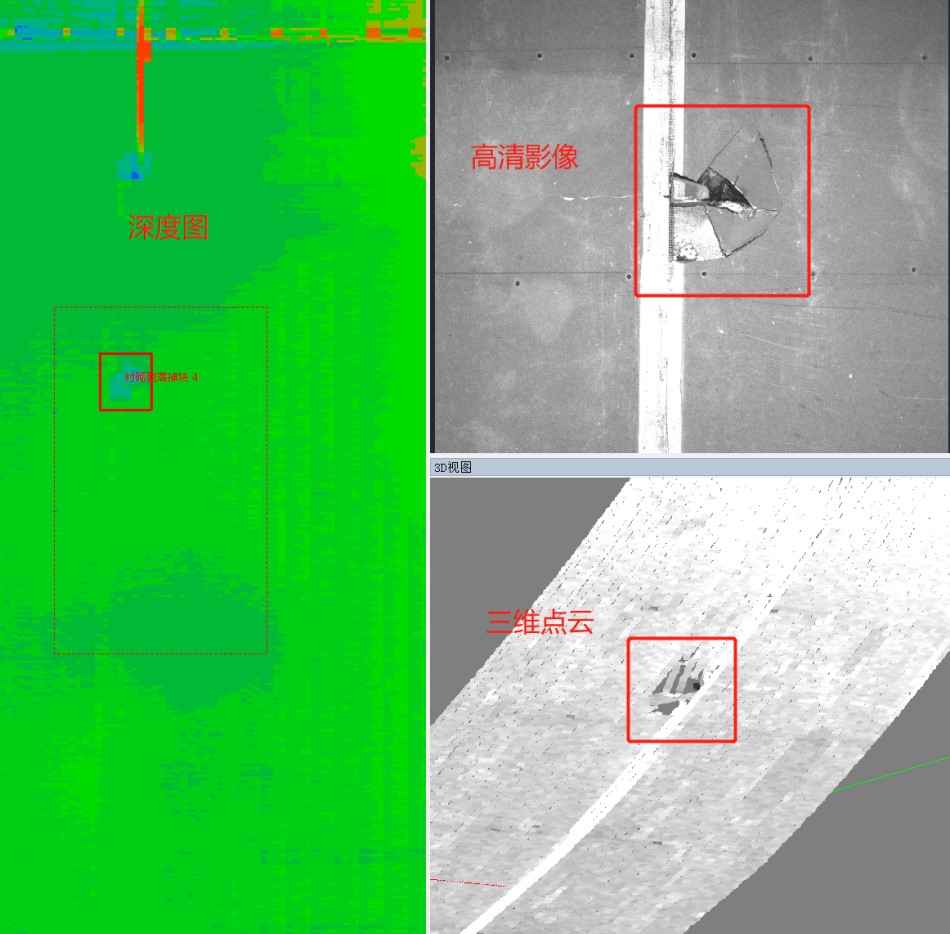
еҹәдәҺеӨҡжәҗж•°жҚ®зҡ„йҡ§йҒ“з—…е®іи°ғжҹҘ
пјҲ3пјүеҹәдәҺдёүз»ҙзӮ№дә‘зҡ„йҮҢзЁӢдҝ®жӯЈе®ҡдҪҚ
|
йЎ№зӣ® |
й«ҳзІҫеәҰдёүз»ҙжҝҖе…үзӮ№дә‘ |
дј з»ҹж–№ејҸ |
|
й«ҳзІҫеәҰйҮҢзЁӢе®ҡдҪҚ |
д»Ҙй«ҳзІҫеәҰз»„еҗҲеҜјиҲӘе®ҡдҪҚжҠҖжңҜиҫ“еҮәзҡ„е®ҡдҪҚж•°жҚ®дёәеҹәеҮҶпјҢз”ҹжҲҗйҡ§йҒ“дёүз»ҙжҝҖе…үзӮ№дә‘пјҢдёҚеҸ—иЎҢ驶иҪЁиҝ№еҪұе“ҚпјҢеқҮеҸҜйҮҚжһ„жҜҸдёӘйҡ§йҒ“зҡ„й«ҳзІҫеәҰдёүз»ҙжЁЎеһӢгҖӮеҹәдәҺжӯӨжЁЎеһӢиҝӣиЎҢйҮҢзЁӢдҝ®жӯЈпјҢд»…йңҖеңЁйҡ§йҒ“дёӨз«ҜиҝӣиЎҢйҮҢзЁӢдҝ®жӯЈпјҲж”ҜжҢҒеңЁйҡ§йҒ“еҶ…д»»ж„ҸдҪҚзҪ®иҝӣиЎҢйҮҢзЁӢдҝ®жӯЈпјүпјҢеҚіеҸҜе°Ҷз—…е®ійҮҢзЁӢдёҺе®һйҷ…йҮҢзЁӢиҜҜе·®жҺ§еҲ¶еңЁ0.2mд»ҘеҶ…пјҢдёәе…»жҠӨз®ЎзҗҶеҚ•дҪҚжҸҗдҫӣзІҫеҮҶзҡ„з—…е®ідҝЎжҒҜгҖӮдёҚд»…дҝқиҜҒдәҶжөӢзҡ„е…ЁпјҢд№ҹе®һзҺ°дәҶжөӢзҡ„еҮҶгҖӮ |
дј з»ҹжЈҖжөӢж–№ејҸд»…йқ зј–з ҒеҷЁиҝӣиЎҢйҮҢзЁӢе®ҡдҪҚпјҢеӣ жЈҖжөӢи®ҫеӨҮ移еҠЁиҝҮзЁӢдёӯж— жі•е§Ӣз»Ҳе№іиЎҢдәҺйҡ§йҒ“зҡ„дёӯеҝғиҪҙзәҝж–№еҗ‘пјҢйҡҸзқҖзј–з ҒеҷЁиҜҜе·®зҙҜз§ҜпјҢз—…е®ійҮҢзЁӢиҜҜе·®йҡҸд№ӢеўһеӨ§пјҢ并且йҡ§йҒ“дёӯжІЎжңүеҜҶйӣҶзҡ„йҮҢзЁӢж Үеҝ—пјҢж— жі•зІҫеҮҶж ЎеҮҶйҮҢзЁӢгҖӮдј з»ҹйқўйҳөзӣёжңәеӣҫеғҸзҡ„жӢјжҺҘиҜҜе·®зӯүеӣ зҙ еқҮдјҡеҪұе“ҚйҮҢзЁӢзІҫеәҰгҖӮз—…е®ійҮҢзЁӢе®ҡдҪҚиҜҜе·®й—®йўҳдёҚеҸҜйҒҝе…ҚгҖӮ |
еҹәдәҺйҮҢзЁӢе®ҡдҪҚдҝ®жӯЈе®ҡдҪҚзІҫеәҰ
пјҲ4пјүеҹәдәҺзҒ°еәҰеӣҫиҫ“еҮәйҡ§йҒ“з—…е®іеұ•еёғеӣҫ
|
йЎ№зӣ® |
еҹәдәҺзҒ°еәҰеӣҫз”ҹдә§еұ•еёғеӣҫ |
дј з»ҹж–№ејҸ |
|
з—…е®ідҪҚзҪ®еҢ№й…Қ |
д»ҘзҒ°еәҰеӣҫдёәеә•еӣҫз”ҹжҲҗеұ•еёғеӣҫпјҢеұ•еёғеӣҫжҳҫзӨәзҡ„з—…е®ідҪҚзҪ®дёҺйҡ§йҒ“дёӯз—…е®іе®һйҷ…дҪҚзҪ®й«ҳзІҫеәҰеҢ№й…ҚпјҢж–№дҫҝз—…е®іжЈҖж ёеҸҠе…»жҠӨеӨ„зҗҶгҖӮ |
еҸ—жӢјжҺҘиҜҜе·®гҖҒйҮҢзЁӢе®ҡдҪҚзӯүй—®йўҳеҪұе“ҚпјҢз—…е®ідҪҚзҪ®еңЁжҳҫзӨәж—¶ж— жі•дёҖдёҖеҢ№й…ҚгҖӮ |
|
жҲҗжһңеұ•зӨә |
зҒ°еәҰеӣҫз—…е®іеұ•еёғеӣҫзӣҙжҺҘйҖҡиҝҮйҮҚжһ„зҡ„й«ҳзІҫеәҰйҡ§йҒ“дёүз»ҙжЁЎеһӢз”ҹжҲҗпјҢж— жӢјжҺҘзјқгҖҒеҢҖе…үдёҚеқҮеҢҖзӯүй—®йўҳгҖӮ |
еұ•еёғеӣҫж•ҲжһңеҸ—еӣҫеғҸжӢјжҺҘиҜҜе·®гҖҒеҢҖе…үй—®йўҳгҖҒеӣҫеғҸеҸҳеҪўзӯүй—®йўҳеҪұе“ҚгҖӮ |
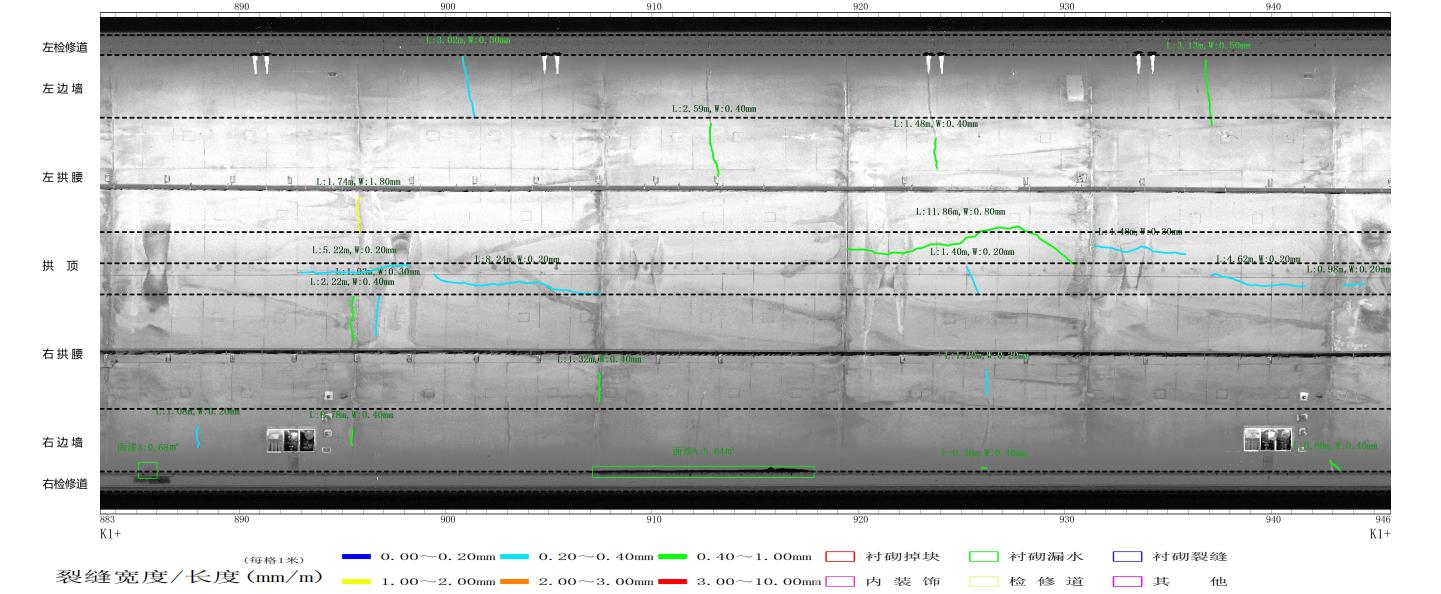
зҒ°еәҰеӣҫз—…е®іеұ•еёғеӣҫ
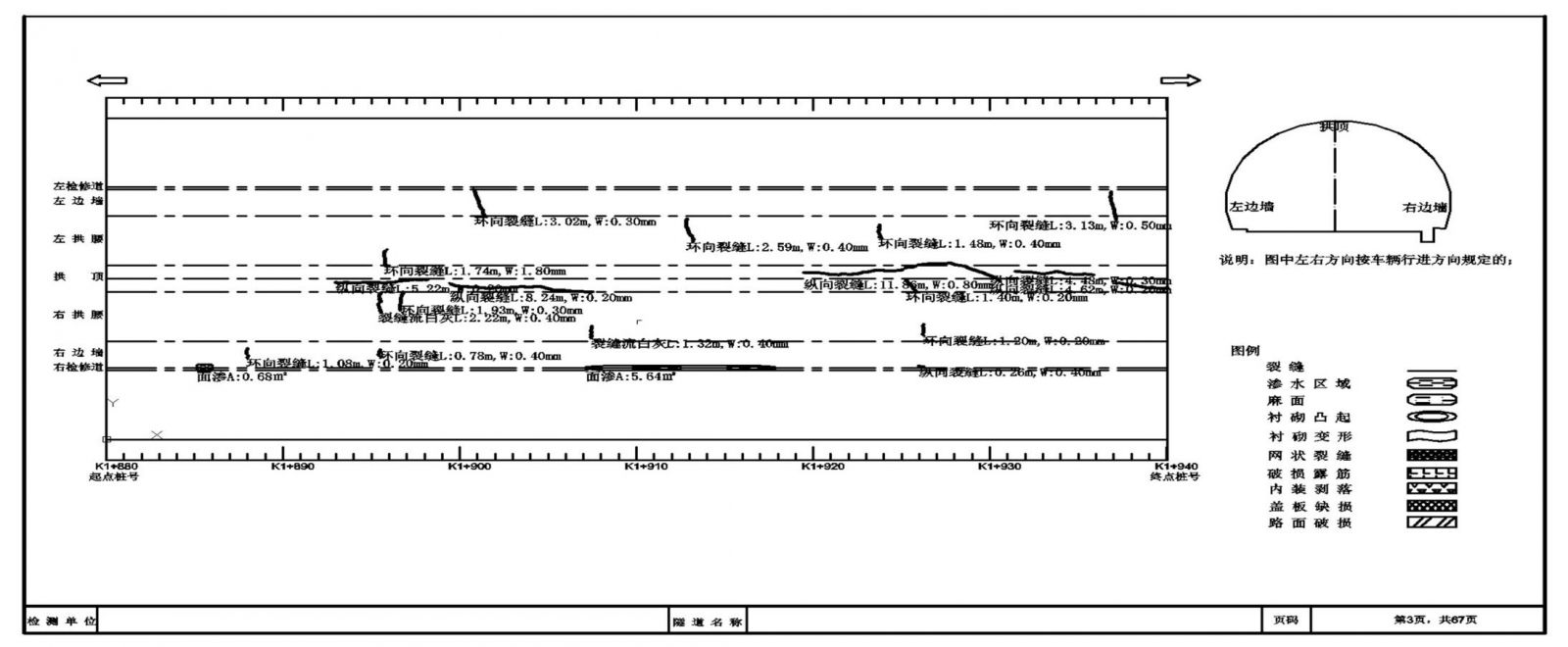
CADз—…е®іеұ•еёғеӣҫ
зӣ®еүҚе…¬еҸёиҜҘжҠҖжңҜе·Із»ҸжҲҗеҠҹеә”з”ЁдәҺж№–еҢ—гҖҒжІіеҚ—гҖҒдә‘еҚ—гҖҒиҙөе·һгҖҒз”ҳиӮғгҖҒйҷ•иҘҝзӯүеҚҒдҪҷдёӘзңҒд»ҪзәҰ2000е…¬йҮҢзҡ„е…¬и·Ҝйҡ§йҒ“жЈҖжөӢйЎ№зӣ®пјҢжҠҖжңҜзҡ„е…ҲиҝӣжҖ§еҸҠдјҳеҠҝе·Іеҫ—еҲ°е……еҲҶйӘҢиҜҒпјҢе…·дҪ“дјҳеҠҝеҰӮдёӢпјҡ
пјҲ1пјүеҠҹиғҪе…ЁпјҡеҗҢж—¶жЈҖжөӢйҡ§йҒ“иЎ¬з ҢгҖҒжЈҖдҝ®йҒ“гҖҒжҺ’ж°ҙжІҹзӯүдҪҚзҪ®зҡ„з—…е®ігҖӮ
пјҲ2пјүзІҫеәҰй«ҳпјҡиЈӮзјқжЈҖжөӢзІҫеәҰ0.3mmпјҢзӣёиҫғзәҜеӣҫеғҸжЈҖжөӢж–№ејҸпјҢдёүз»ҙжҝҖе…үзҡ„з©әй—ҙеҮ дҪ•жөӢйҮҸзІҫеәҰй«ҳпјҢеҸҜзІҫзЎ®иҜҶеҲ«еҸҳеҪўзұ»з—…е®іпјҢжҺүеқ—жЈҖжөӢзІҫеәҰ5mmгҖӮ
пјҲ3пјүе®ҡдҪҚеҮҶпјҡдёүз»ҙжҝҖе…үзӮ№дә‘еҸҜеҮҶзЎ®иҜҶеҲ«йҮҢзЁӢжЎ©дҪҚзҪ®пјҢзӣёиҫғзәҜеӣҫеғҸж–№ејҸпјҢеҸҜзІҫзЎ®дҝ®жӯЈйҮҢзЁӢдҝЎжҒҜпјҢйҮҢзЁӢе®ҡдҪҚзІҫеәҰ0.2mгҖӮ
пјҲ4пјүе№ҝйҖӮз”ЁпјҡеҸҜеә”з”ЁдәҺе…¬и·Ҝйҡ§йҒ“гҖҒй“Ғи·Ҝйҡ§йҒ“гҖҒең°й“Ғйҡ§йҒ“гҖҒеј•ж°ҙйҡ§йҒ“зӯүйўҶеҹҹпјҢйҖӮз”ЁжҖ§ејәгҖӮ
пјҲ5пјүжҳ“е®үиЈ…пјҡжЁЎеқ—еҢ–и®ҫи®ЎпјҢдҪ“з§Ҝе°ҸпјҢйҮҚйҮҸиҪ»пјҢе®үиЈ…зҒөжҙ»гҖҒиҪ»дҫҝпјҢж”ҜжҢҒжҗӯиҪҪдәҺSUVеҸҠе•ҶеҠЎиҪҰдёҠиҝӣиЎҢдҪңдёҡпјҢдёҚз»‘е®ҡиҪҪиҪҰгҖӮ
пјҲ6пјүе…Қж Үе®ҡпјҡзі»з»ҹеҗ„дёӘжЁЎеқ—йҮҮз”ЁеҲҡжҖ§з»“жһ„пјҢдј ж„ҹеҷЁдҪҚзҪ®еӣәе®ҡгҖҒзЁіеӣәпјҢж— йңҖеҸҚеӨҚж Үе®ҡпјҢж”ҜжҢҒеҸҚеӨҚжӢҶиЈ…гҖӮ



жӯҰжұүеӨ•зқҝе…үз”өжҠҖжңҜжңүйҷҗе…¬еҸё зүҲжқғжүҖжңү(C)2021 зҪ‘з»ңж”ҜжҢҒ з”ҹж„Ҹе®қ зҪ‘зӣӣе»әз«ҷ и‘—дҪңжқғеЈ°жҳҺ й„ӮICPеӨҮ18019028еҸ·-1